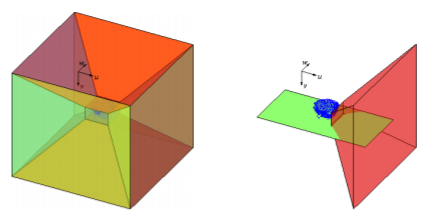
Viewpoint invariant texture description
Yong Xu, Hui Ji, and Cornelia Fermüller
International Journal of Computer Vision, 83 (1), 85 - 100 (2009).
Texture descriptors based on Fractal geometry are shown to be theoretically invariant to smooth transformations, and demonstrated in algorithms on a high-resolution texture database that we collected.
Paper
Abstract
Project page
Image texture provides a rich visual description of the surfaces in the scene. Many texture signatures based on various statistical descriptions and various local measurements have been developed. Existing signatures, in general, are not invariant
to 3D geometric transformations, which is a serious limitation for many applications. In this paper we introduce a new texture signature, called the multifractal spectrum (MFS). The MFS is invariant under the bi-Lipschitz map, which includes view-point
changes and non-rigid deformations of the texture surface, as well as local affine illumination changes. It provides an efficient framework combining global spatial invariance and local robust measurements. Intuitively, the MFS could be viewed
as a “better histogram” with greater robustness to various environmental changes and the advantage of capturing some geometrical distribution information encoded in the texture. Experiments demonstrate that the MFS codes the essential structure
of textures with very low dimension, and thus represents an useful tool for texture classification.
Scale-space texture description on SIFT-like textons
Yong Xu, Sibin Huang, Hui Ji, Cornelia Fermüller
Computer Vision and Image Understanding, 116 (9), 999 - 1013 (2012).
A fractal-based texture descriptor defined on complex features is demonstrated for static and dynamic texture classification.
Paper
Abstract
Project page
Visual texture is a powerful cue for the semantic description of scene structures that exhibit a high degree of similarity in their image intensity patterns. This paper describes a statistical approach to visual texture description that combines
a highly discriminative local feature descriptor with a powerful global statistical descriptor. Based upon a SIFT-like feature descriptor densely estimated at multiple window sizes, a statistical descriptor, called the multi-fractal spectrum (MFS),
extracts the power-law behavior of the local feature distributions over scale. Through this combination strong robustness to environmental changes including both geometric and photometric transformations is achieved. Furthermore, to increase the
robustness to changes in scale, a multi-scale representation of the multi-fractal spectra under a wavelet tight frame system is derived. The proposed statistical approach is applicable to both static and dynamic textures. Experiments showed that
the proposed approach outperforms existing static texture classification methods and is comparable to the top dynamic texture classification techniques
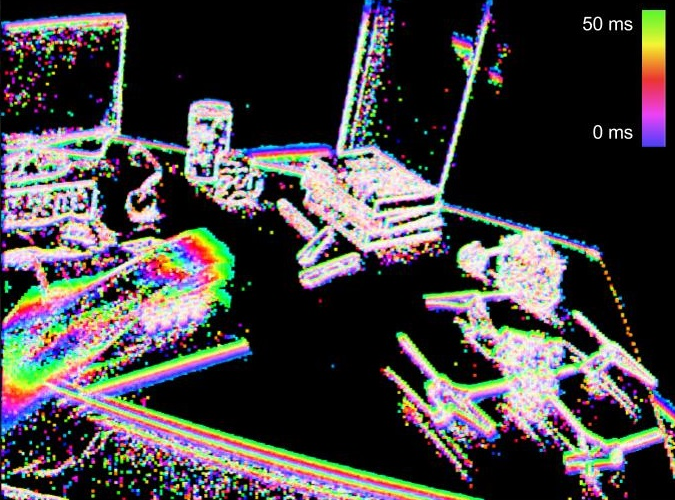
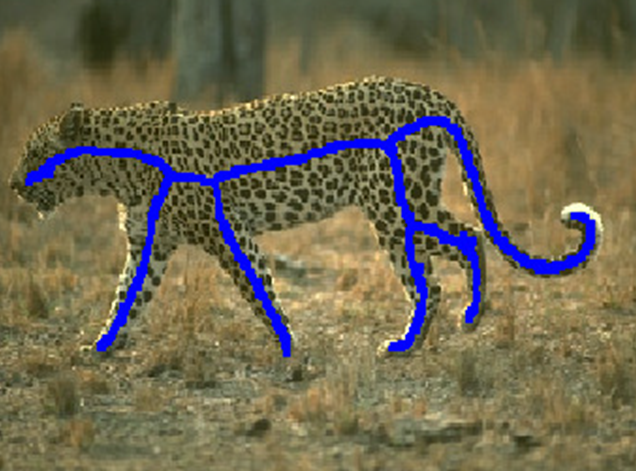
The image torque operator: A new tool for mid-level vision
Morimichi Nishigaki, Cornelia Fermüller, Daniel Dementhon,
IEEE International Conference on Computer Vision (CVPR), 2012
The Torque is an image processing operator that implements the Gestaltist principle of closure. This paper demonstrates the Torque for the applications of attention, boundary detection, and segmentation.
Paper
Abstract
Code
Contours are a powerful cue for semantic image understanding. Objects and parts of objects in the image are delineated from their surrounding by closed contours which make up their boundary. In this paper we introduce a new bottom-up visual operator
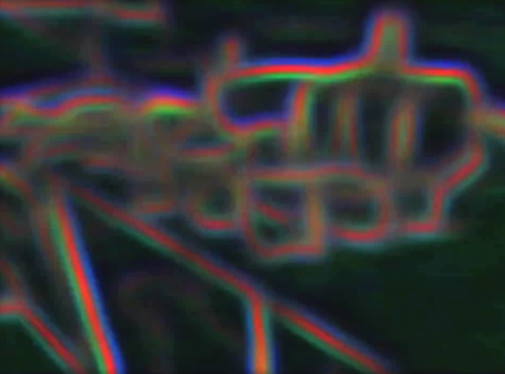
to capture the concept of closed contours, which we call the ’Torque’ operator. Its computation is inspired by the mechanical definition of torque or moment of force, and applied to image edges. The torque operator takes as input edges and computes
over regions of different size a measure of how well the edges are aligned to form a closed, convex contour. We explore fundamental properties of this measure and demonstrate that it can be made a useful tool for visual attention, segmentation,
and boundary edge detection by verifying its benefits on these applications.
A Gestaltist approach to contour-based object recognition: Combining bottom-up and top-down cues
Ching L Teo, Cornelia Fermüller, Yiannis Aloimonos
Advances in Computational Intelligence, 309-321, Springer International Publishing, 2015.
The International Journal of Robotics Research
The Torque is used first in a bottom-up way to detect possible objects. Then task-driven, high-level processes modulate the Torque to recognize specific objects.
Paper
Abstract
Project page
This paper proposes a method for detecting generic classes of objects from their representative contours that can be used by a robot with vision to find objects in cluttered environments. The approach uses a mid-level image operator to group edges
into contours which likely correspond to object boundaries. This mid-level operator is used in two ways, bottom-up on simple edges and top-down incorporating object shape information, thus acting as the intermediary between low-level and high-level
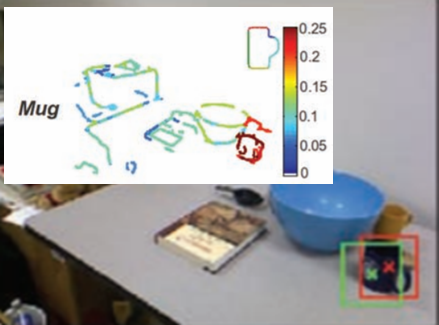
information. First, the mid-level operator, called the image torque, is applied to simple edges to extract likely fixation locations of objects. Using the operator’s output, a novel contour-based descriptor is created that extends the shape context
descriptor to include boundary ownership information and accounts for rotation. This descriptor is then used in a multi-scale matching approach to modulate the torque operator towards the target, so it indicates its location and size. Unlike other
approaches that use edges directly to guide the independent edge grouping and matching processes for recognition, both of these steps are effectively combined using the proposed method. We evaluate the performance of our approach using four diverse
datasets containing a variety of object categories in clutter, occlusion and viewpoint changes. Compared with current state-of-the-art approaches, our approach is able to detect the target with fewer false alarms in most object categories. The
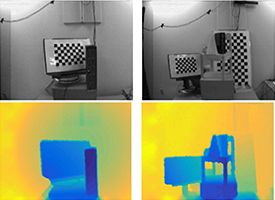
performance is further improved when we exploit depth information available from the Kinect RGB-Depth sensor by imposing depth consistency when applying the image torque.
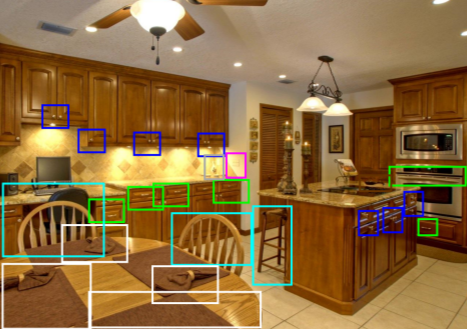
Fast 2d border ownership assignment
Ching Teo, Cornelia Fermüller, Yiannis Aloimonos.
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2015.
Local and global features, inspired from psychological studies, are used to learn contour detection and assignment of neighboring foreground and background.
Paper
Abstract
Project page
A method for efficient border ownership assignment in 2D images is proposed. Leveraging on recent advances using Structured Random Forests (SRF) for boundary detection, we impose a novel border ownership structure that detects both boundaries and
border ownership at the same time. Key to this work are features that predict ownership cues from 2D images. To this end, we use several different local cues: shape, spectral properties of boundary patches, and semi-global grouping cues that are
indicative of perceived depth. For shape, we use HoG-like descriptors that encode local curvature (convexity and concavity). For spectral properties, such as extremal edges, we first learn an orthonormal basis spanned by the top K eigenvectors
via PCA over common types of contour tokens. For grouping, we introduce a novel mid-level descriptor that captures patterns near edges and indicates ownership information of the boundary. Experimental results over a subset of the Berkeley Segmentation
Dataset (BSDS) and the NYU Depth V2 dataset show that our method’s performance exceeds current state-of-the-art multi-stage approaches that use more complex features.
Detection and segmentation of 2D curved reflection symmetric structurest
Ching Teo, Cornelia Fermüller, Yiannis Aloimonos.
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2015.
Curved reflectional symmetries of objects are detected and then used for segmenting the objects.
Paper
Abstract
Project page
Symmetry, as one of the key components of Gestalt theory, provides an important mid-level cue that serves as input to higher visual processes such as segmentation. In this work, we propose a complete approach that links the detection of curved reflection
symmetries to produce symmetryconstrained segments of structures/regions in real images with clutter. For curved reflection symmetry detection, we leverage on patch-based symmetric features to train a Structured Random Forest classifier that detects
multiscaled curved symmetries in 2D images. Next, using these curved symmetries, we modulate a novel symmetryconstrained foreground-background segmentation by their symmetry scores so that we enforce global symmetrical consistency in the final
segmentation. This is achieved by imposing a pairwise symmetry prior that encourages symmetric pixels to have the same labels over a MRF-based representation of the input image edges, and the final segmentation is obtained via graph-cuts. Experimental
results over four publicly available datasets containing annotated symmetric structures: 1) SYMMAX-300, 2) BSD-Parts, 3) Weizmann Horse (both from) and 4) NY-roads demonstrate the approach’s applicability to different environments with state-of-the-art
performance.
Shadow-Free Segmentation in Still Images Using Local Density Measure
Aleksandrs. Ecins, Cornelia Fermüller, Yiannis Aloimonos. .
International Conference on Computational Photography (ICCP), 2014 .
A figure-ground segmentation algorithm, not affected by shadow is proposed, which specifically was designed for textured regions.
Paper
Abstract
Project page
Over the last decades several approaches were introduced to deal with cast shadows in background subtraction applications. However, very few algorithms exist that address the same problem for still images. In this paper we propose a figure ground
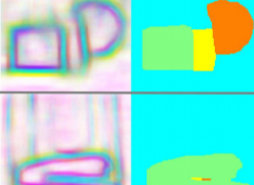
segmentation algorithm to segment objects in still images affected by shadows. Instead of modeling the shadow directly in the segmentation process our approach works actively by first segmenting an object and then testing the resulting boundary
for the presence of shadows and resegmenting again with modified segmentation parameters. In order to get better shadow boundary detection results we introduce a novel image preprocessing technique based on the notion of the image density map.
This map improves the illumination invariance of classical filterbank based texture description methods. We demonstrate that this texture feature improves shadow detection results. The resulting segmentation algorithm achieves good results on
a new figure ground segmentation dataset with challenging illumination conditions.