Abstract
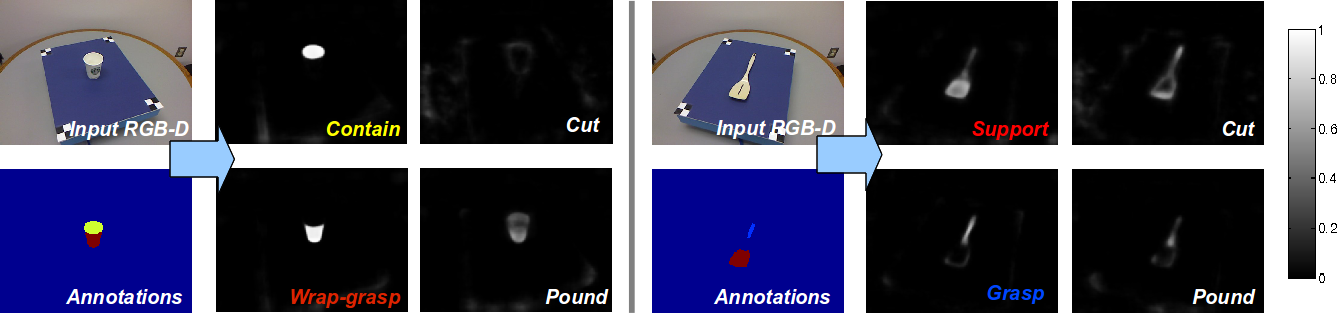
As robots begin to collaborate with humans in everyday workspaces, they will need to understand the functions of tools and their parts. To cut an apple or hammer a nail, robots need to not just know the tool's name, but they must localize the tool's parts and identify their functions. Intuitively, the geometry of a part is closely related to its possible functions, or its affordances. Therefore, we propose two approaches for learning affordances from local shape and geometry primitives: 1) superpixel based hierarchical matching pursuit (S-HMP); and 2) structured random forests (SRF). Moreover, since a part can be used in many ways, we introduce a large RGB-Depth dataset where tool parts are labeled with multiple affordances and their relative rankings. With ranked affordances, we evaluate the proposed methods on 3 cluttered scenes and over 105 kitchen, workshop and garden tools, using ranked correlation and a weighted F-measure score. Experimental results over sequences containing clutter, occlusions, and viewpoint changes show that the approaches return precise predictions that could be used by a robot. S-HMP achieves high accuracy but at a significant computational cost, while SRF provides slightly less accurate predictions but in real-time. Finally, we validate the effectiveness of our approaches on the Cornell Grasping Dataset for detecting graspable regions, and achieve state-of-the-art performance.
Code and Data
- RGB-D Part Affordance Dataset.
- S-HMP code.
- SRF code for real-time afforandance detection.