Click here for a two-page summary of VTOY performance as of August 2000
 |
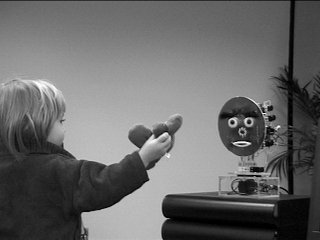
V-TOYS is a visually interactive robot that understands and reacts to human presence and visual communication messages. V-TOY replicates, functionally, the upper part of the human body. It has a rotating neck, two controllable eyes, a camera, and controllable deformable eyebrows and a mouth.V-TOY detects when a human walks sufficiently close and then greets the person verbally and visually by displaying a smile. Then, V-TOY introduces and demonstrates its capabilities and invites the user to test how well it can understand and mimic her conveyed facial expressions. |
 |
Eye contact, face expressions and actions play an important role in
human communication. In addition to conveying emotions they are employed
to augment and control the flow of human interactions. Toys are currently
visually blind. They cannot recognize the presence of humans, identify
their communicative messages, or react to these messages. Animators
have long recognized the value of facial expressions in making actors convey
more realism. Moreover, they often employ exaggerated animations
(cartoon-like animations) to increase the intensity of the viewer's involvement.
The V-TOY robot, PONG, has a total of 12 servos resulting in 11 1/2 degrees of freedom.. The eyes constructed from ping-pong ball each have two degrees, azimuth and elevation, of rotational freedom. This enables PONG to establish eye contact with people in the camera's field of view and track them as they move. The eye browses each have one degree of freedom that corresponds to the corrugators supercilii and medial frontalis muscles. This allows PONG to raise and lower his eye brows. The mouth is controlled by 4 servos. The first two enable the left and right mouth corners to move up and down. The second two enable the upper and lower middle lip to move up and down enabling the mouth to be opened and closed. Finally the neck has two servos controlling the pan and tilt position of the head. PONG is interfaced using an RS232 port driven from a Java application that allows control of all 12 servos. The video camera is imbedded in the position of the nose.V-TOY is a prototype of a future toy having the following capabilities:
- Detection of the presence of humans, their gaze and facial actions.
- Controlled neck and eye movements and generation of facial deformations such as mouth and eyebrows deformations.
- Speaker localization and speech recognition for verbal commands
- A small set of behaviors designed to attract the attention of a human.
 |
 |
 |
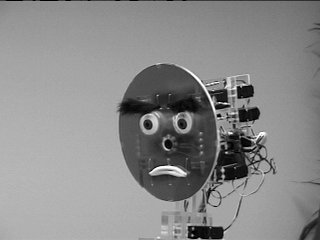
Face expression recognition
|
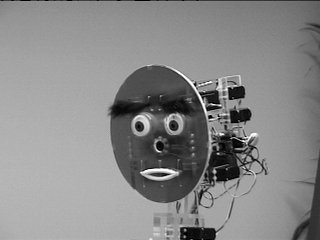
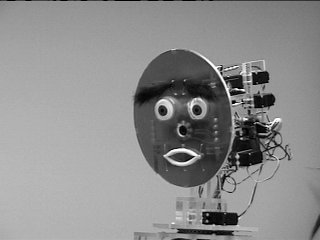
Gaze recognition and face expression generation
|